

Endobronchiální navigace v poslední době zažívá velký rozvoj a využívá se stále častěji jak pro navigaci bronchoskopu k lézi, tak pro potvrzení správného místa biopsie (tzv. point monitoring). V následujícím textu se zaměříme na 5 nejčastěji používaných modalit, které dosahují podobných výsledků, ač využívají značně různé principy.
Radiální sonda s endobronchiální ultrasonografií (rEBUS)
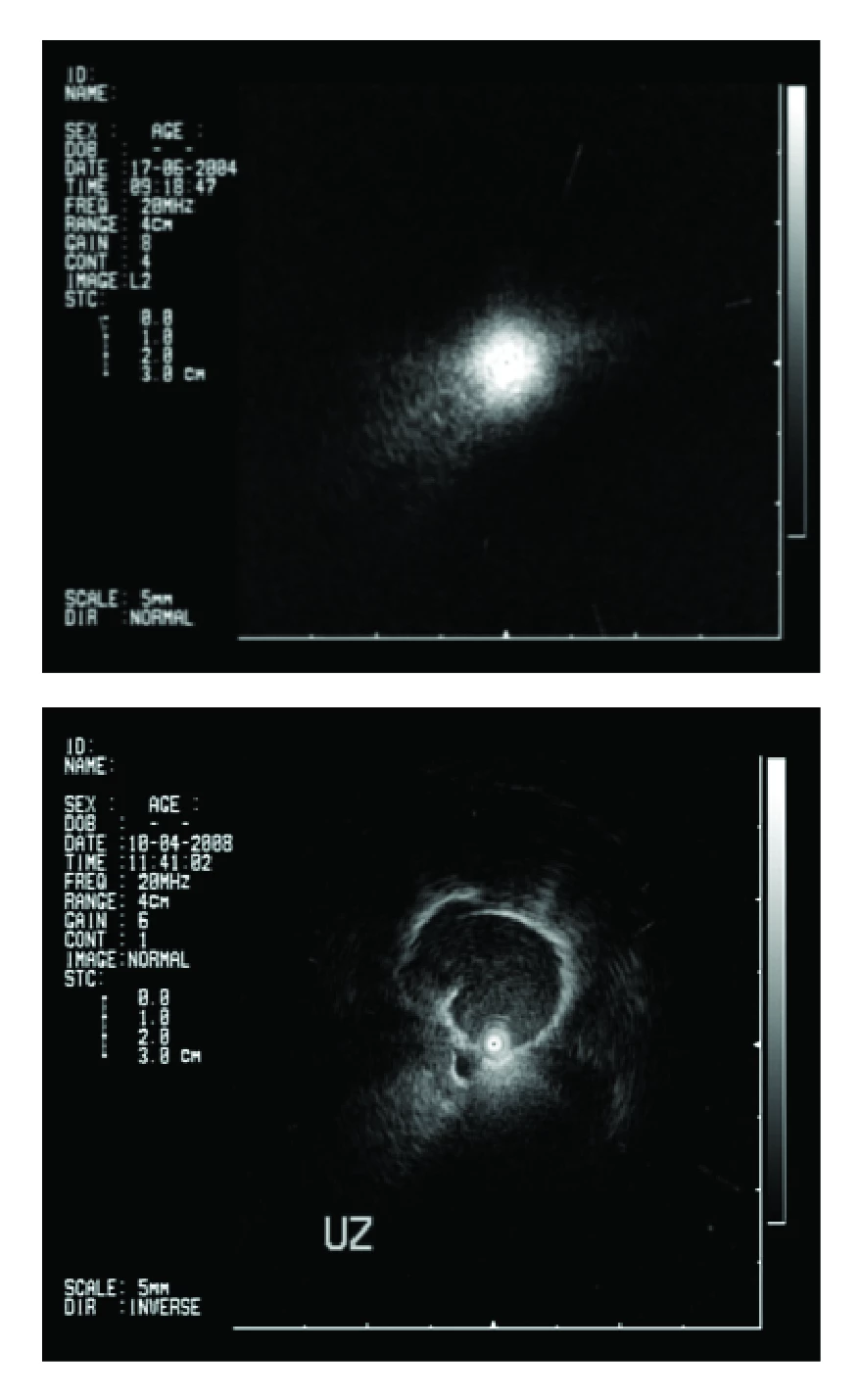
Radiální endobronchiální ultrazvuk (rEBUS) je metoda pro point monitoring, která vyžaduje tenký bronchoskop o průměru 4 mm a miniaturní radiální ultrazvukovou sondu (20 MHz). K vlastní navigaci je nutné použít skiaskopii a k usnadnění správného zavádění obvykle potřebujeme vodicí katétr (tzv. guide sheath – GS) a naváděcí zařízení se 2 klouby, které umožňuje zavádění do užších periferních bronchiálních větví.
Za skiaskopické kontroly se GS se zavedeným naváděcím zařízením nasměruje do místa patologie viděné na skiaskopii a poté se na místo naváděcího zařízení zavede sonda rEBUS pro verifikaci správného místa odběru. Následně provádíme biopsii (viz obr. 1). Souhrnná diagnostická citlivost této metody se udává kolem 70 %.1
Obr. 1 Verifikace místa odběru pomocí rEBUS
Virtuální navigovaná bronchoskopie (VBN)
Virtuální bronchoskopická navigace (VBN) je jednou z metod, které se v současnosti klinicky používají ke zlepšení diagnostického výnosu u periferních plicních lézí. Využívá se speciální software, který provádí 3D rekonstrukci snímků z vyšetření hrudníku pomocí multidetektorové výpočetní tomografie (CT). Vygenerovaná 3D rekonstrukce dýchacích cest pacienta představuje virtuální cestu až k cílové lézi, kterou poté bronchoskopista využívá pro vedení bronchoskopu a bioptických nástrojů podobně jako řidič GPS navigaci.
V současné době může technologie virtuální navigace dosáhnout bronchu 0.−6. řádu. Diagnostická výtěžnost je u kombinace VBN a EBUS mírně vyšší než u pacientů vyšetřovaných prostou konfirmací rEBUS. Použití VBN zkracuje dobu vyšetření, neboť se do blízkosti léze dostaneme dříve.2
Problémem této metody může být nesrovnalost mezi CT obrazem a bronchoskopickými snímky v reálném čase (tzv. CT-to-body divergence), jež vzniká snímáním CT hrudníku v maximálním nádechu, zatímco bronchoskopie je poté prováděna při klidném dýchání.3 Tento rozdíl může způsobit lokalizační chybu až 4 cm.
Elektromagnetická navigační bronchoskopie (ENB)
Pro periferní léze obtížně dosažitelné konvenční bronchoskopií se doporučuje elektromagnetická navigační bronchoskopie (ENB). Stejně jako VBN využívá softwaru, který v první fázi pomocí 3D rekonstrukce CT hrudníku vymodeluje virtuální cestu k patologické lézi. V další fázi se navíc kolem pacienta vytvoří elektromagnetické pole a na hruď se umístí senzory, což umožňuje synchronizaci virtuálně vytvořené cesty se skutečnými anatomickými body pacienta. a tím zvýšení úspěšnosti navigace.
Citlivost ENB
Diagnostický přínos, citlivost a negativní prediktivní hodnota (NPV) elektromagnetické navigace dosud nejsou zcela jisté a musejí být stanovené prospektivními studiemi. Jednou z nich je například multicentrická kohortová studie NAVIGATE, která prospektivně hodnotila diagnostický výnos ENB s důsledným sledováním po dobu 24 měsíců pro eliminaci falešně negativních výsledků. Zahrnovala 1388 účastníků, z nichž u 95,7 % byla provedena biopsie plicního uzlu. Celková diagnostická výtěžnost ENB v této studii činila 67,8 %, specificita detekce malignity dosáhla 100 % a NPV byla 47 %. Mezi komplikace spojené s ENB patřily pneumothorax (4,7 %), závažné krvácení (2,7 %) a respirační selhání (0,6 %).4Zjištěná citlivost odpovídá recentní metaanalýze 46 studií využívajících EBN, podle níž senzitivita metody činí přibližně 70 %.5
Tomosyntéza
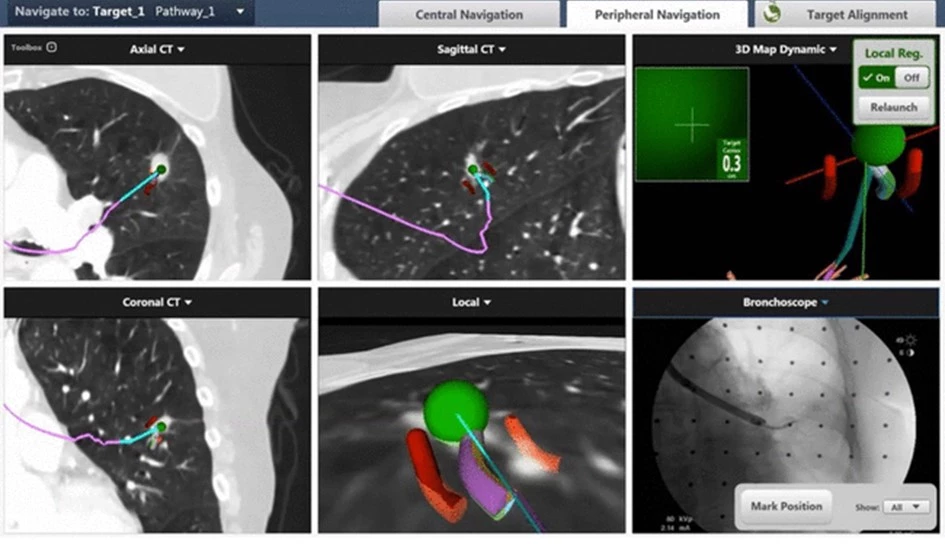
Významným diferenciačním nástrojem, který se může projevit jako principiální výhoda, je využití tomosyntézy. Spojení zobrazení skiaskopu a elektromagnetické navigace nám může pomoci k odstranění CT-to-body divergence (viz obr. 2). Diagnostická výtěžnost elektromagnetické navigace s tomosyntézou dosahuje až 83 %.6
Obr. 2 Využití tomosyntézy při EMN
Roboticky navigovaná bronchoskopie (RNB)
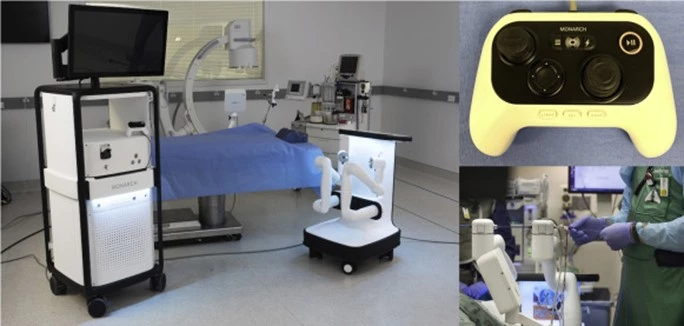
K postupnému zavádění robotické chirurgie dochází napříč mnoha obory, neboť nabízí potenciální výhody ve zlepšené obratnosti a zároveň dobré vizualizaci při zachování minimálně invazivních přístupů. Využívají se jednorázové bronchoskopy připojené k robotickému rameni (viz obr. 3). Hlavními výhodami jsou vyšší stabilita endoskopu v průběhu celého výkonu a možnost dostat se do perifernějších dýchacích cest než s konvenčním tenkým bronchoskopem.
Obr. 3 Robotický bronchoskopický systém
Časné preklinické i klinické zkušenosti s robotickým endoskopem v převážně amerických centrech jsou však zatím nejednoznačné. Diagnostická účinnost v malých studiích se pohybuje v rozmezí 40–80 % pro uzly o velikosti 0,8–2 cm.5, 7
Na jednoznačnější výsledky a zejména výsledky kombinace s metodami point monitoring, jako jsou konfokální mikroendoskopie, optická koherenční tomografie či rEBUS, si v evropských podmínkách ještě budeme muset počkat.
Výpočetní tomografie s kuželovým svazkem (CBCT)
Výpočetní tomografie s využitím kuželovitého svazku (CBCT − cone beam CT) je dobře zavedenou zobrazovací metodou s mnoha osvědčenými aplikacemi v řadě klinických oborů. V poslední době se CBCT stává důležitým zobrazovacím nástrojem i pro bronchoskopisty, primárně se používá během transbronchiální biopsie periferních plicních lézí. Pro tuto aplikaci se CBCT osvědčila při navigaci zařízení k cílové lézi, při potvrzování polohy nástroje v lézi a také při akvizici tkáně. Vedle toho hraje důležitou roli ve studiích hodnotících bronchoskopickou ablaci tím, že pomáhá určit umístění ablační sondy vzhledem k cílové lézi.
CBCT lze využít s konvenční bronchoskopií nebo i v kombinaci s jinými navigačními metodami, například s ENB. Výtěžnost kombinovaného přístupu s ENB dosahuje 72 %.8 Univerzálnější přijetí této technologie zatím omezuje spíše cena zařízení, nikoliv radiační zátěž, která je vcelku nízká.
doc. MUDr. Jiří Votruba, Ph.D.
MUDr. Lenka Návratová
1. klinika tuberkulózy a respiračních nemocí 1. LF UK a VFN v Praze
Reference:
- 1. Ali M. S., Trick W., Mba B. I. et al. Radial endobronchial ultrasound for the diagnosis of peripheral pulmonary lesions: a systematic review and meta-analysis. Respirology 2017; 22 (3): 443–453, doi: 10.1111/resp.12980.
- 2. Xu C., Yuan Q., Wang Y. et al. Usefulness of virtual bronchoscopic navigation combined with endobronchial ultrasound guided transbronchial lung biopsy for solitary pulmonary nodules. Medicine (Baltimore) 2019; 98 (7): e14248, doi: 10.1097/MD.0000000000014248.
- 3. Pritchett M. A., Bhadra K., Calcutt M., Folch E. Virtual or reality: divergence between preprocedural computed tomography scans and lung anatomy during guided bronchoscopy. J Thorac Dis 2020; 12 (4): 1595–1611, doi: 10.21037/jtd.2020.01.35.
- 4. Folch E. E., Bowling M. R., Pritchett M. A. et al. NAVIGATE 24-month results: Electromagnetic navigation bronchoscopy for pulmonary lesions at 37 Centers in Europe and the United States. J Thorac Oncol 2022; 17 (4): 519–531, doi: 10.1016/j.jtho.2021.12.008.
- 5. Kops S. E. P., Heus P., Korevaar D. A. et al. Diagnostic yield and safety of navigation bronchoscopy: a systematic review and meta-analysis. Lung Cancer 2023; 180: 107196, doi: 10.1016/j.lungcan.2023.107196.
- 6. Avasarala S. K., Roller L., Katsis J. et al. Sight unseen: Diagnostic yield and safety outcomes of a novel multimodality navigation bronchoscopy platform with real-time target acquisition. Respiration 2022; 101 (2): 166–173, doi: 10.1159/000518009.
- 7. Chaddha U., Kovacs S. P., Manley C. et al. Robot-assisted bronchoscopy for pulmonary lesion diagnosis: results from the initial multicenter experience. BMC Pulm Med 2019; 19 (1): 243, doi: 10.1186/s12890-019-1010-8.
- 8. Verhoeven R. L. J., Fütterer J. J., Hoefsloot W., van der Heijden E. H. F. M. Cone-beam CT image guidance with and without electromagnetic navigation bronchoscopy for biopsy of peripheral pulmonary lesions. J Bronchology Interv Pulmonol 2021; 28 (1): 60−69, doi: 10.1097/LBR.0000000000000697.